Last week I received this cool robot from Kuman donated for the Visuino development :-).
It has Remote WiFi control module, Camera, and 4 servos Manipulator.
I already posted my first ever Unboxing video - showing the robot coming out of the box :-)
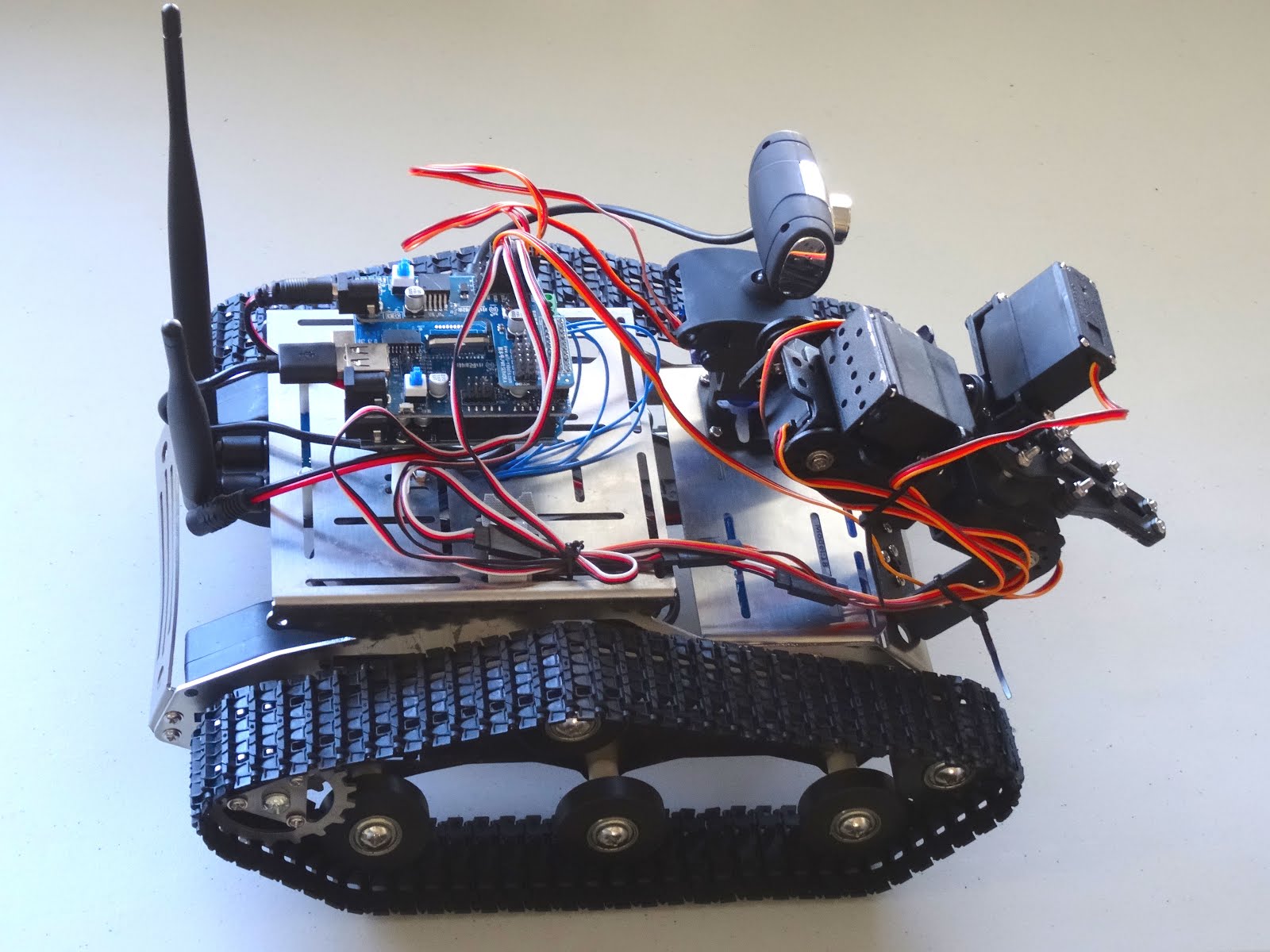
The robot has 4 main parts that need to come together:
1. The Chassis
2. The control and Wi-Fi boards
3. The Camera with its Pan and Tilt mount
4. The Manipulator
The Manipulator and the Chassis are preassembled.
The Pan and Tilt mount however needs to be assembled. It is a popular type of mount, so I decided to make a video of assembling it first, and show how to mount it on the chassis in following videos.
And it became my first ever Assembly video:
I completely assembled the robot already. Here are some pictures of it:


I am processing the recorded videos of the entire assembly, and will post them soon :-)
Then start working to program the robot with Visuino and control it with VideoLab, VisionLab, IntelligenceLab, and CommunicationLab :-)
Cheers,
Boian
#Visuino #Arduino
No comments:
Post a Comment